


This glove-controlled robotic hand was the final project for my Mechatronics class at Rose-Hulman. Collaborating with a partner, we completed the project after a week of work. I primarily worked on the hardware and did a small amount of programming. My partner wrote the algorithm for the communication between the robotic hand and the glove. We used a Microchip microprocessor and programmed it with MPLAB using the C programming language.
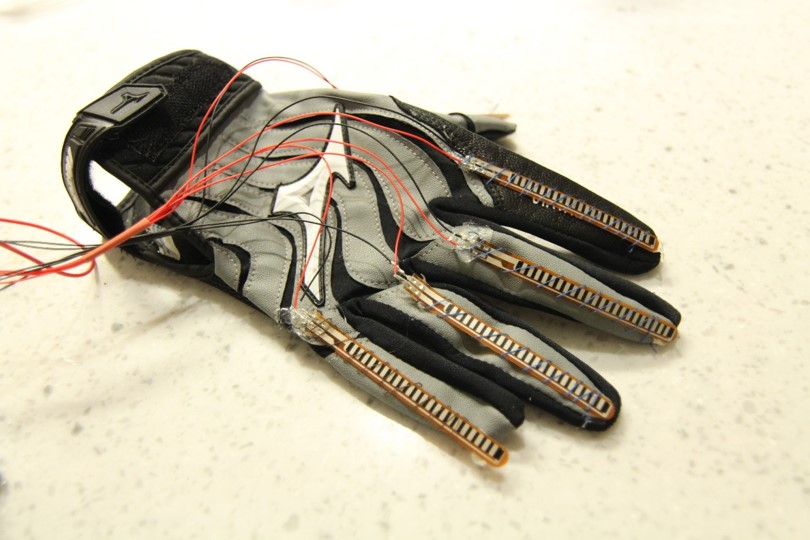
The glove with the resistive flex sensors
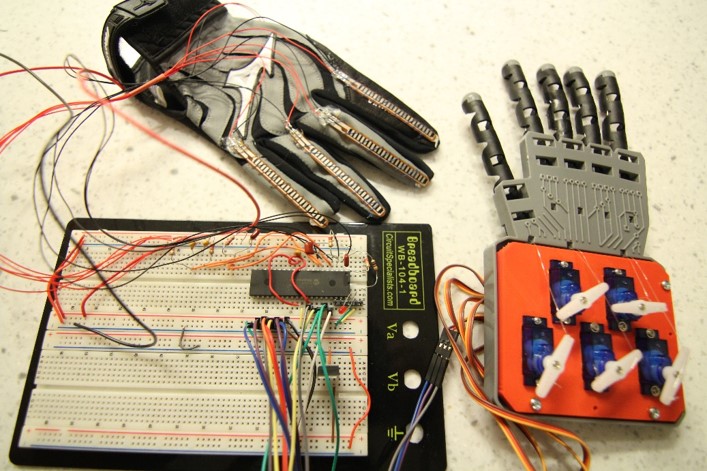
The hardware used for this project
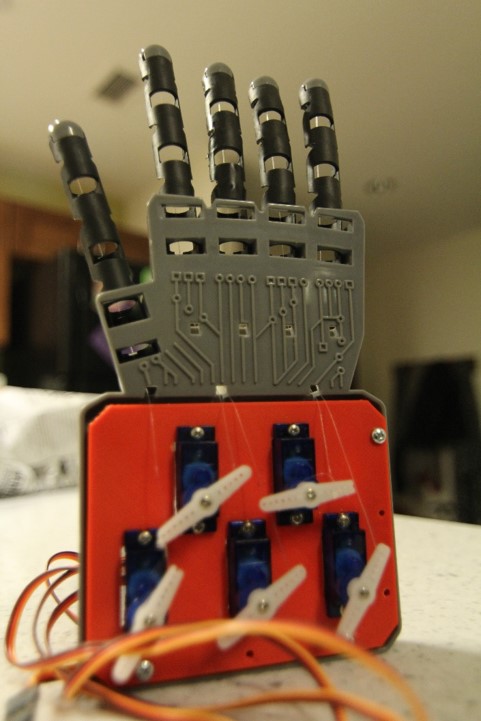
Modified Robotic hand with five small 9g servos